Gwint pojedyńczy odcinek g33, Y (patrz “gwint, Pojedyńczy odcinek g33” na stroni 250). g3 – HEIDENHAIN CNC Pilot 4290 V7.1 Instrukcja Obsługi
Strona 250: 22 cykle gwintowania
250
4.22 Cykle gwintowania
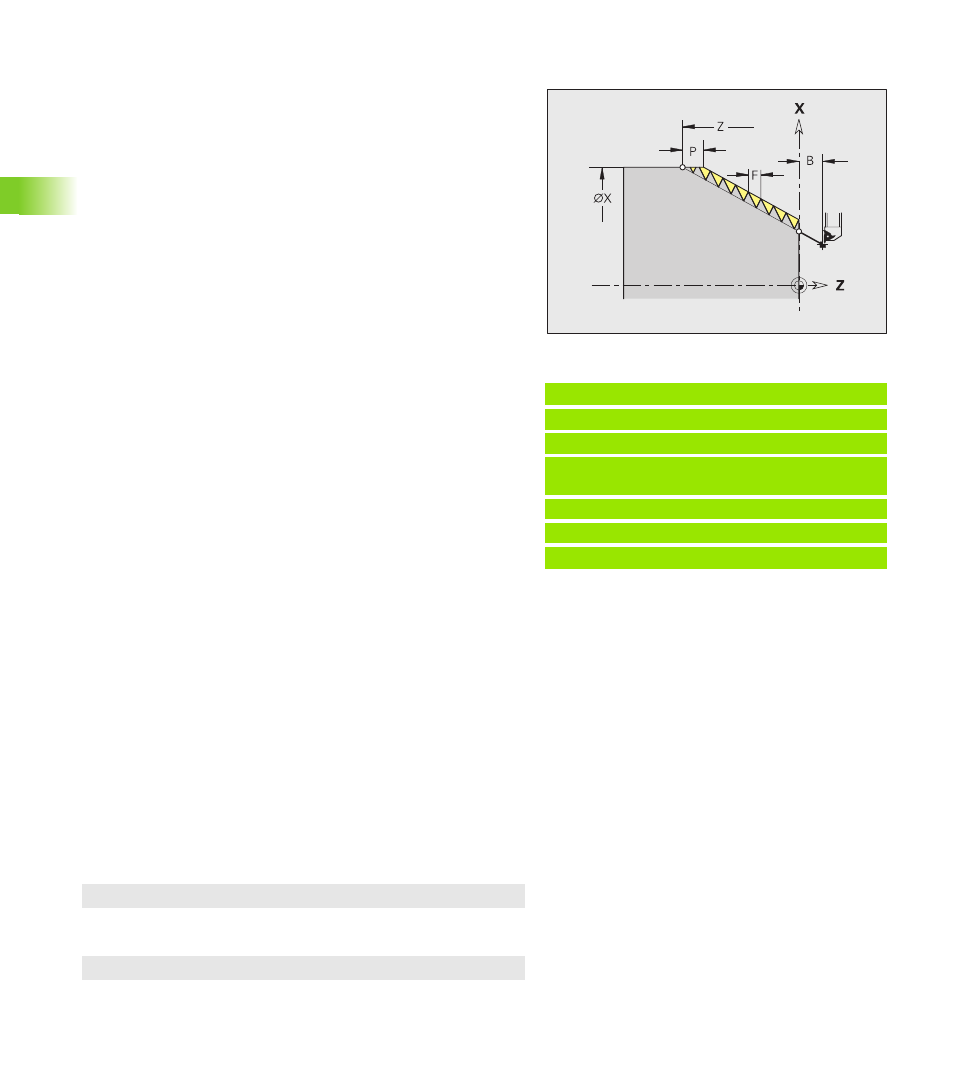
Gwint pojedyńczy odcinek G33
G33 wykonuje pojedyńcze nacinanie gwintu. Kierunek jest dowolny
(wzdłużne, stożkowe lub planowe; gwinty wewnętrzne lub
zewnętrzne). Poprzez programowanie kilku G33 po sobie można
wytworzyć połączony gwint.
Pozycjonować narzędzie o "długość dobiegu B" przed gwintem, jeśli
suport musi przyśpieszyć na prędkość posuwu. Uwzględnić „długość
wybiegu P“ przed „punktem końcowym gwintu“, jeśli suport musi
wyhamować.
Długość dobiegu B: suport potrzebuje rozbiegu przed właściwym
gwintem, aby osiągnąć zaprogramowaną prędkość posuwu.
Długość wybiegu P: suport wymaga wybiegu na końcu gwintu, aby
wyhamować suport. Proszę uwzględnić, iż równoległy do osi odcinek
"P" zostaje pokonany także przy ukośnym wybiegu gwintu.
Jeśli gwint wykonywany jest ze sprzężeniem w przód, to CNC PILOT
sprawdza długość dobiegu i wybiegu. Jeśli te odcinki są krótsze, niż
przedstawiono w poniższym wzorze, to sterowanie wydaje
ostrzeżenie.
Minimalną długość dobiegu i wybiegu obliczamy z następującej
formuły.
Przykład: G33
. . .
N1 T5 G97 S1100 G95 F0.5 M3
N2 G0 X101.84 Z5
N3 G33 X120 Z-80 F1.5 [gwint pojedyńczy
odcinek]
N4 G33 X140 Z-122.5 F1.5
N5 G0 X144
. . .
Parametry
X
Punkt końcowy gwintu (wymiar średnicy)
Z
Punkt końcowy gwintu
F
Posuw na jeden obrót (skok gwintu)
B
Długość dobiegu (długość drogi przyśpieszenia) – default: 0
P
Długość wybiegu (długość drogi przyśpieszenia) – default: 0
C
Kąt startu (początek gwintu leży określony do nie-
obrotowosymetrycznych elementów konturu) - (default: 0)
Q
Numer wrzeciona
H
Kierunek bazowy dla skoku gwintu (default: 0)
H=0: posuw na osi Z dla gwintu podłużnego i stożkowego
do maksymalnie +45°/–45° w stosunku do osi Z
H=1: posuw na osi X dla gwintu podłużnego i stożkowego
do maksymalnie +45°/–45° w stosunku do osi X
H=3: posuw na trajektorii
E
Zmienny skok (standard: 0)
E=0: stały skok
E>0: zwiększa skok na obrót o E
E<0: zmniejsza skok na obrót o E
Smooth-Threading wyłączony
Długość dobiegu: B = 0,75 * (F*S)² / a + 0,15
Długość wybiegu: P = 0,75 * (F*S)² / e + 0,15
Smooth-Threading włączony