Ruch kołowy g2/g3, 13 proste przemieszczenia liniowe i ko łow e – HEIDENHAIN CNC Pilot 4290 V7.1 Instrukcja Obsługi
Strona 195
HEIDENHAIN CNC PILOT 4290
195
4.13 Proste przemieszczenia liniowe i ko
łow
e
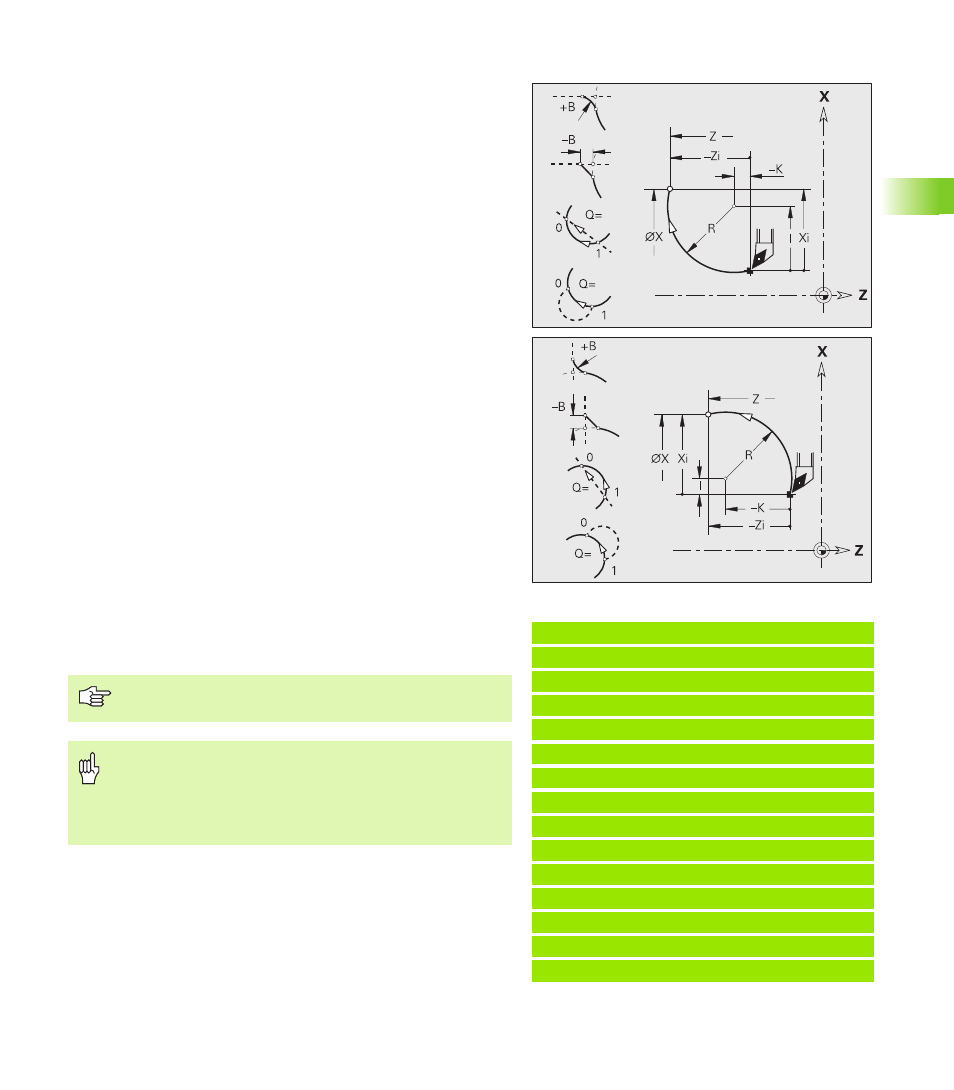
Ruch kołowy G2/G3
G2/G3 przemieszcza kołowo z posuwem do "punktu końcowego".
Wymiarowanie punktu środkowego następuje przyrostowo. Kierunek
obrotu (patrz rysunek pomocniczy):
G2: zgodnie z ruchem wskazówek zegara
G3. w kierunku przeciwnym do ruchu wskazówek zegara
Przykład: G2, G3
. . .
N1 T3 G95 F0.25 G96 S200 M3
N2 G0 X0 Z2
N3 G42
N4 G1 Z0
N5 G1 X15 B-0.5 E0.05
N6 G1 Z-25 B0
N7 G2 X45 Z-32 R36 B2
N8 G1 A0
N9 G2 X80 Z-80 R20 B5
N10 G1 Z-95 B0
N11 G3 X80 Z-135 R40 B0
N12 G1 Z-140
N13 G1 X82 G40
. . .
Parametry
X
Punkt końcowy (wymiar średnicy)
Z
Punkt końcowy
R
Promień (0 < R <= 200 000 mm)
I
Punkt środkowy inkrementalnie (odstęp punkt startu - punkt
środkowy; wymiar promienia)
K
Punkt środkowy inkrementalnie (odstęp punkt startu - punkt
środkowy)
Q
Punkt przecięcia. Punkt końcowy, jeśli odcinek przecina prostą
lub łuk kołowy (standard: 0):
Q=0: bliski punkt przecięcia
Q=1: oddalony punkt przecięcia
B
Fazka/zaokrąglenie. Definiuje przejście do następnego
elementu konturu. Proszę zaprogramować teoretyczny punkt
końcowy, jeśli wykorzystujemy fazkę/zaokrąglenie.
brak wpisu: przejście tangencjalne
B=0: nie tangencjalne przejście
B>0: promień zaokrąglenia
B<0: szerokość fazki
E
Współczynnik specjalnego posuwu dla fazki/zaokrąglenia
(standard: 1)
Posuw specjalny = aktywny posuw * E (0 < E <= 1)
Programowanie X, Z: absolutnie, przyrostowo,
samozachowawczo lub „?“
Uwaga niebezpieczeństwo kolizji!
Jeśli parametry adresowe zostają obliczane z "V-
zmiennymi", to dokonywane jest tylko ograniczone
sprawdzanie. Proszę upewnić się, że wartości zmiennych
dają łuk kołowy.