Przykład: ruch po prostej biegunowy – HEIDENHAIN TNC 426 (280 462) Instrukcja Obsługi
Strona 113
100
6 Programowanie: Programowanie konturów
6.5 Ruchy po torze kształtowym + współrzdne biegunowe
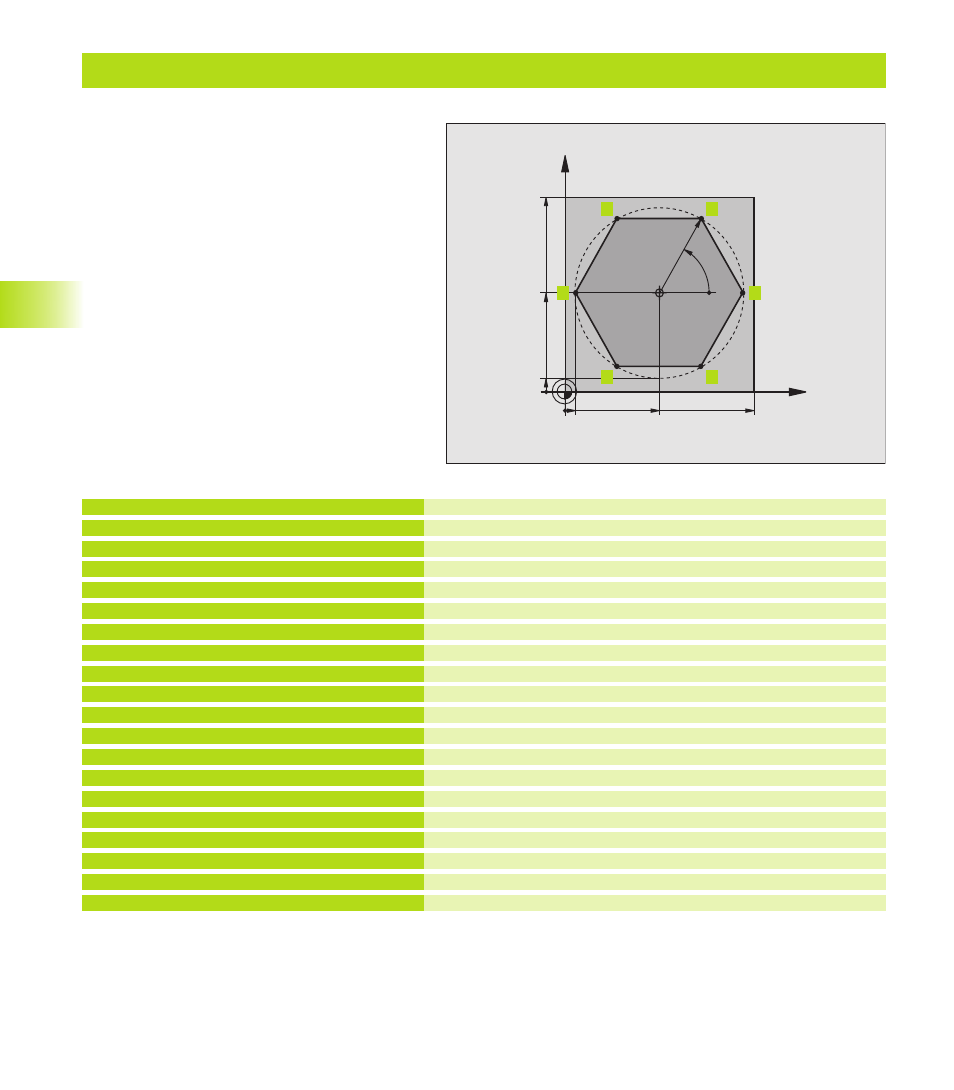
Przykład: ruch po prostej biegunowy
Definicja cz ści nieobrobionej
Definicja narz dzia
Wywołanie narz dzia
Zdefiniować punkt odniesienia dla współrz dnych biegunowych
Narz dzie przemieszczać swobodnie
Narz dzie wst pnie pozycjonować
Przejść na gł bokość obróbki
Dosun ć narz dzie do konturu w punkcie 1 na okr gu
z przyleganiem stycznym
Dosun ć narz dzie do punktu 2
Dosun ć narz dzie do punktu 3
Dosun ć narz dzie do punktu 4
Dosun ć narz dzie do punktu 5
Dosun ć narz dzie do punktu 6
Dosun ć narz dzie do punktu 1
Opuścić kontur na okr gu ze stycznym przyleganiem
Przemieścić swobodnie narz dzie, koniec programu
0 BEGIN PGM LINEARPO MM
1 BLK FORM 0.1 Z X+0 Y+0 Z 20
2 BLK FORM 0.2 X+100 Y+100 Z+0
3 TOOL DEF 1 L+0 R+7,5
4 TOOL CALL 1 Z S4000
5 CC X+50 Y+50
6 L Z+250 R0 F MAX
7 LP PR+60 PA+180 R0 F MAX
8 L Z 5 R0 F1000 M3
9 APPR PLCT PR+45 PA+180 R5 RL F250
10 LP PA+120
11 LP PA+60
12 LP PA+0
13 LP PA 60
14 LP PA 120
15 LP PA+180
16 DEP PLCT PR+60 PA+180 R5 F1000
17 L Z+250 R0 F MAX M2
18 END PGM LINEARPO MM
X
Y
50
100
50
CC
5
100
R45
60°
5
1
2
6
3
5
4