Przykład: ruchy kołowe w systemie kartezjańskim – HEIDENHAIN TNC 426 (280 462) Instrukcja Obsługi
Strona 107
94
6 Programowanie: Programowanie konturów
6.4 Ruchy po torze kształtowym + pr
ostoktne współrzdne
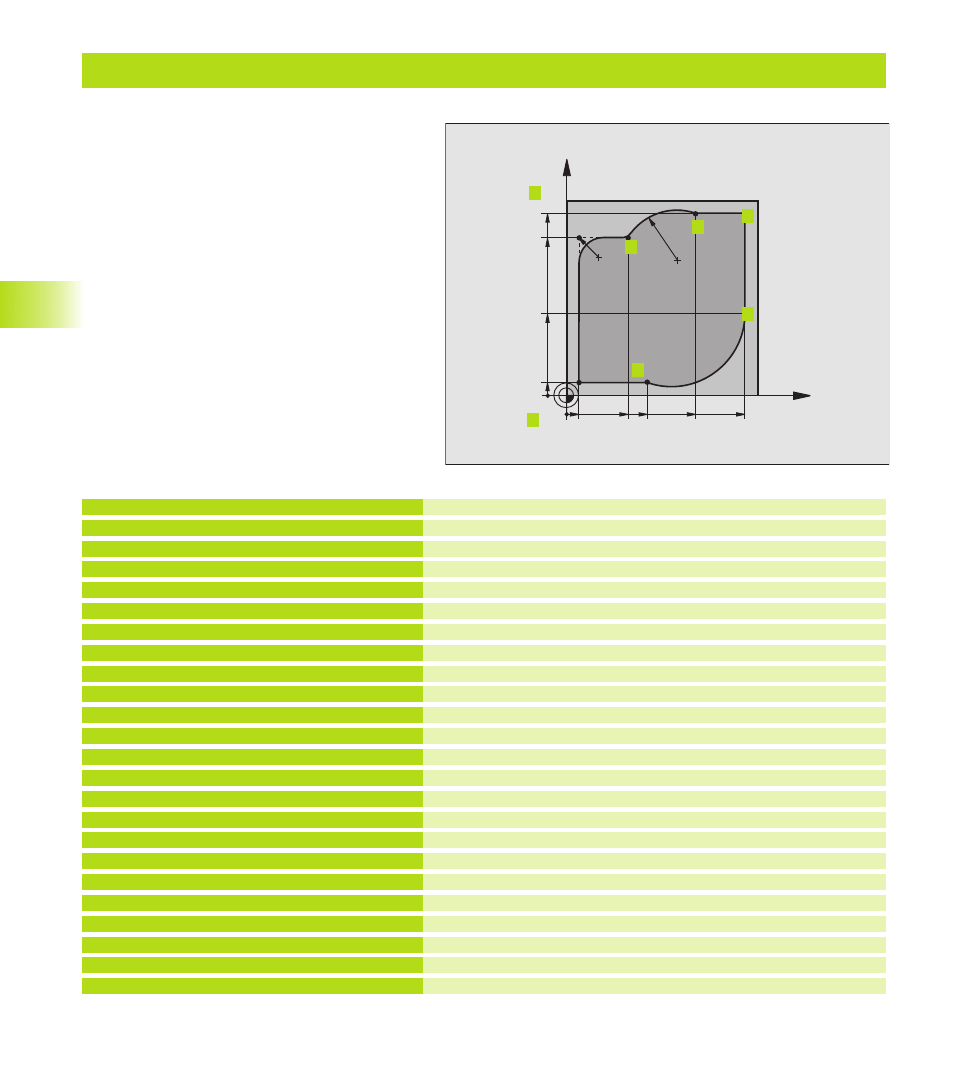
Przykład: ruchy kołowe w systemie kartezjańskim
0 BEGIN PGM CIRCULAR MM
1 BLK FORM 0.1 Z X+0 Y+0 Z 20
2 BLK FORM 0.2 X+100 Y+100 Z+0
3 TOOL DEF 1 L+0 R+10
4 TOOL CALL 1 Z S4000
5 L Z+250 R0 F MAX
6 L X 10 Y 10 R0 F MAX
7 L Z 5 R0 F1000 M3
8 APPR LCT X+5 Y+5 R5 RL F300
9 L Y+85
10 RND R10 F150
11 L X+30
12 CR X+70 Y+95 R+30 DR
13 L X+95
14 L Y+40
15 CT X+40 Y+5
16 L X+5
17 DEP LCT X 20 Y 20 R5 F1000
18 L Z+250 R0 F MAX M2
19 END PGM CIRCULAR MM
Definicja cz ści w stanie nieobrobionym z graficzn symulacj obróbki
Definicja narz dzia w programie
Wywołanie narz dzia z osi wrzeciona i pr dkości obrotow
Narz dzie przemieszczać swobodnie w osi wrzeciona w trybie
przyśpieszonym FMAX
Pozycjonować wst pnie narz dzie
Przemieszczenie na gł bokość obróbki z posuwem F=1000 mm/min
Dosun ć narz dzie do konturu w punkcie 1 na torze kołowym z
przyleganiem stycznym
Punkt 2: pierwsza prosta dla naroża 2
Promień z R = 10 mm wnieść, posuw: 150 mm/min
Dosun ć narz dzie do punktu 3: punkt pocz tkowy koła z CR
Dosun ć narz dzie do punktu 4: punkt końcowy koła z CR, promień 30 mm
Dosun ć narz dzie do punktu 5
Dosun ć narz dzie do punktu 6
Dosun ć narz dzie do punktu 7: punkt końcowy koła, łuk koła ze
stycznym
przył czeniem do punktu 6, TNC oblicza samodzielnie promień
Dosun ć narz dzie do ostatniego punktu 1 konturu
Opuścić kontur na torze kołowym z przyleganiem stycznym
Narz dzie przemieszczać swobodnie, koniec programu
X
Y
95
5
95
5
85
40
40
30
70
R10
R30
1
2
3
4
5
6
7