Współrz dne biegunowe, 1 podstawy – HEIDENHAIN iTNC 530 (340 49x-02) ISO programming Instrukcja Obsługi
Strona 96
96
4 Programowanie: Podstawy, zarz dzanie plikami, pomoce przy programowaniu, zarz dzanie paletami
4.1 Podstawy
Współrz dne biegunowe
Jeżeli rysunek wykonawczy jest wymiarowany prostok tnie, prosz
napisać program obróbki także ze współrz dnymi prostok tnymi. W
przypadku przedmiotów z łukami kołowymi lub przy podawaniu
wielkości k tów, łatwiejsze jest ustalenie położenia przy pomocy
współrz dnych biegunowych.
W przeciwieństwie do współrz dnych prostok tnych x,y i z,
współrz dne biegunowe opisuj tylko położenie na jednej
płaszczyźnie. Współrz dne biegunowe maj swój punkt zerowy na
biegunie CC (CC = circle centre; angl. środek koła). Pozycja w jednej
płaszczyźnie jest jednoznacznie określona przez:
Współrz dne biegunowe promień: odst p od bieguna CC do
pozycji
współrz dne biegunowe k t: K t współrz dnych biegunowych:
k t pomi dzy osi odniesienia k ta i odcinkiem ł cz cym biegun
CC z dan pozycj .
Patrz rysunek po prawej stronie u góry
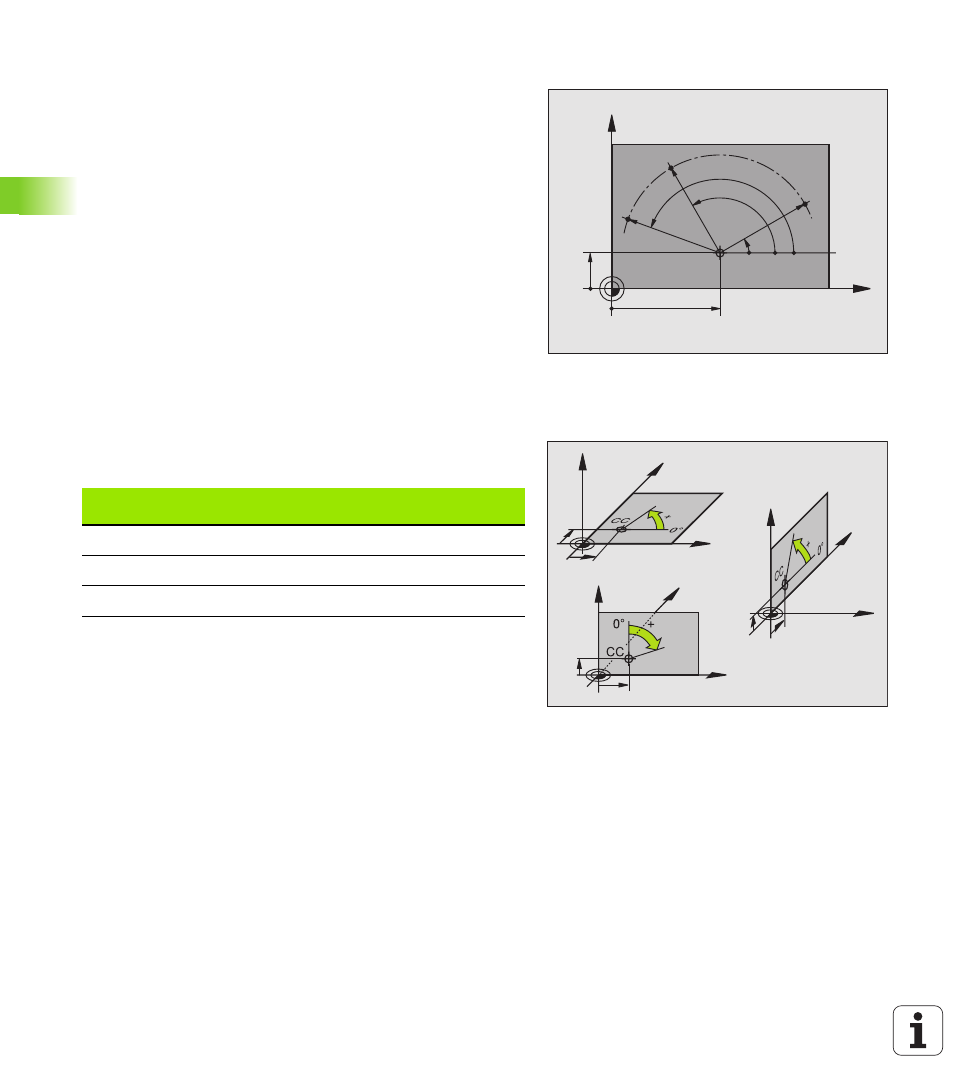
Określenie bieguna i osi odniesienia k ta
Biegun określa si przy pomocy dwóch współrz dnych w
prostok tnym układzie współrz dnych na jednej z trzech płaszczyzn.
Tym samym jest także jednoznacznie zaszeregowana oś odniesienia
k ta dla k ta współrz dnych biegunowych PA.
Współrz dne bieguna
(płaszczyzna)
Oś odniesienia k ta
X/Y
+X
Y/Z
+Y
Z/X
+Z
X
Y
0°
30
10
CC
R
H
1
H
2
R
R
H
3
X
Z
Y
X
Z
Y
X
Z
Y
I
J
K
K
J
I