HEIDENHAIN iTNC 530 (340 49x-04) Touch Probe Cycles Instrukcja Obsługi
Strona 58
58
3 Cykle sondy pomiarowej dla automatycznej kontroli obrabianego przedmiotu
3.1 Automatyczne rejestrowanie uko
śnego po
ło
żenia prze
dmiotu
OBROT PODSTAWOWY kompensować przez oś
obrotu (cykl sondy pomiarowej 403, DIN/ISO:
G403)
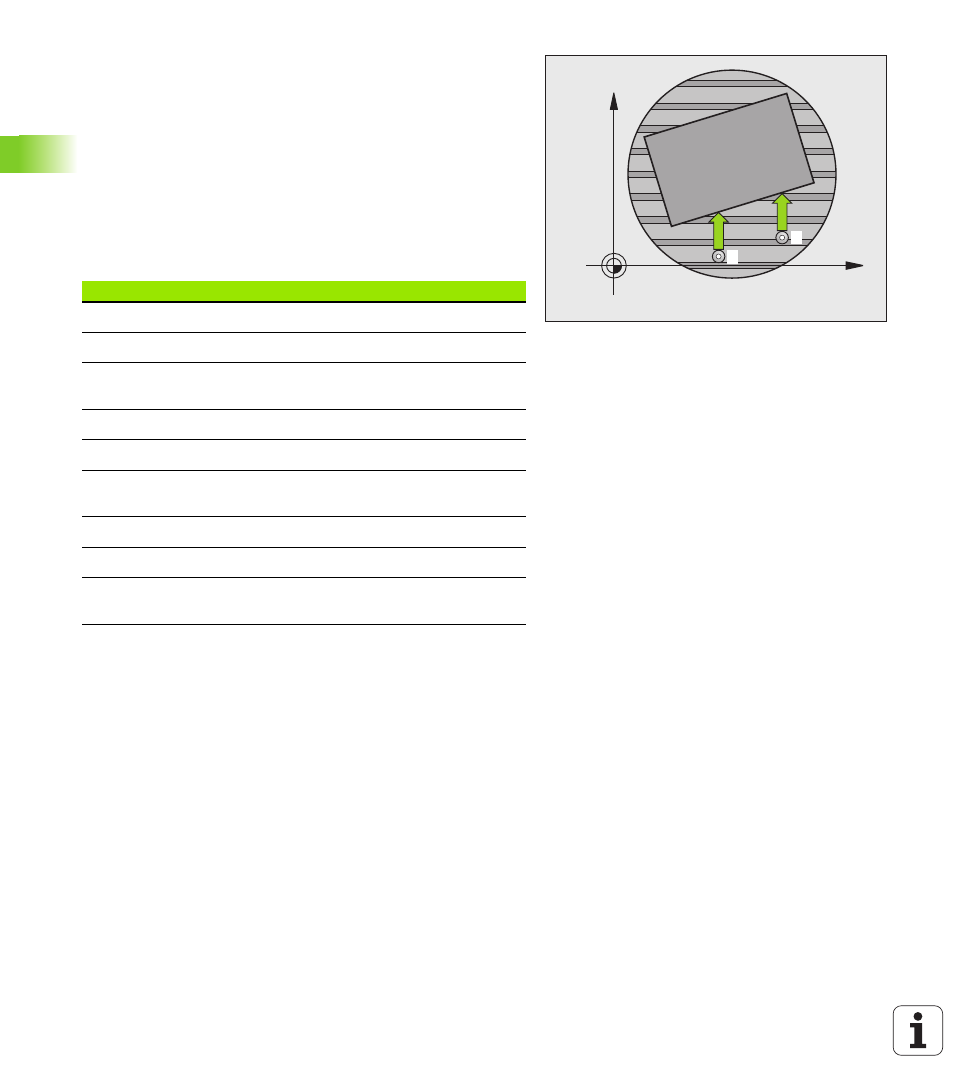
Cykl sondy pomiarowej 403 ustala poprzez pomiar dwóch punktów,
które muszą leżeć na prostej, położenie ukośne obrabianego
przedmiotu. Ustalone ukośne położenie obrabianego przedmiotu TNC
kompensuje poprzez obrót osi A, B lub C. Obrabiany przedmiot może
przy tym być dowolnie zamocowany na stole obrotowym.
Przedstawione poniżej kombinacje osi pomiaru (parametr cyklu Q272)
i osi kompensacji (parametr cyklu Q312) są dozwolone. Funkcja
nachylenia płaszczyzny obróbki:
1 TNC pozycjonuje sondę z posuwem szybkim (wartość z MP6150
lub MP6361) i przy pomocy logiki pozycjonowania (patrz
„Odpracowywanie cykli sondy pomiarowej” na stronie 26) do
zaprogramowanego punktu próbkowania
1
. TNC przesuwa przy
tym sondę pomiarową o odstęp bezpieczeństwa w kierunku
przeciwnym do ustalonego kierunku przemieszczenia
2 Następnie sonda pomiarowa przemieszcza się na wprowadzoną
wysokość pomiaru i przeprowadza pierwszą operację próbkowania
z posuwem próbkowania (MP6120 lub MP6360)
3 Następnie sonda pomiarowa przemieszcza się do następnego
punktu próbkowania
2
i wykonuje drugą operację próbkowania
X
Y
1
2
Aktywna oś sondy
Oś pomiaru
Oś kompensacji
Z
X (Q272=1)
C (Q312=6)
Z
Y (Q272=2)
C (Q312=6)
Z
Z (Q272=3)
B (Q312=5) lub A
(Q312=4)
Y
Z (Q272=1)
B (Q312=5)
Y
X (Q272=2)
C (Q312=5)
Y
Y (Q272=3)
C (Q312=6) lub A
(Q312=4)
X
Y (Q272=1)
A (Q312=4)
X
Z (Q272=2)
A (Q312=4)
X
X (Q272=3)
B (Q312=5) lub C
(Q312=6)