2 automatyczne ustalanie punktów odniesienia – HEIDENHAIN iTNC 530 (340 49x-04) Touch Probe Cycles Instrukcja Obsługi
Strona 103
HEIDENHAIN iTNC 530
103
3.2 Automatyczne ustalanie punktów odniesienia
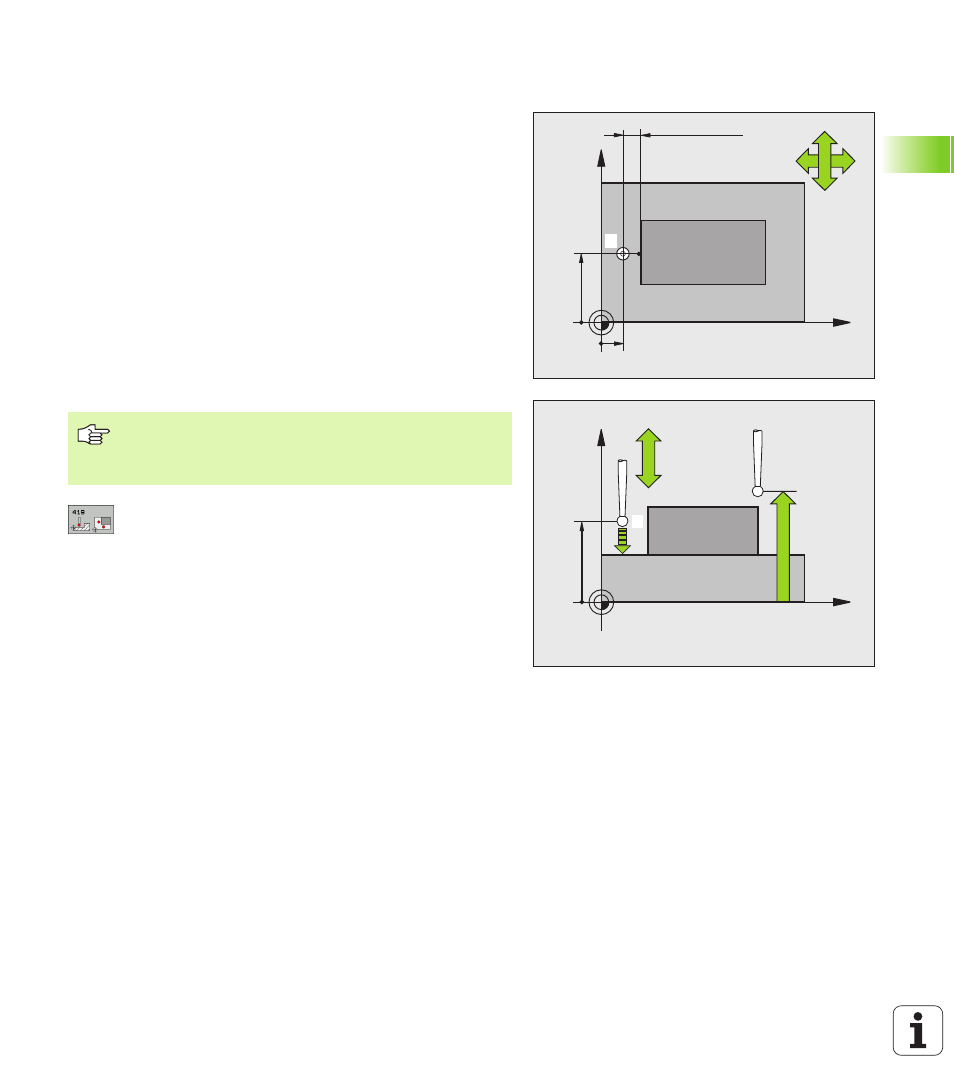
PUNKT ODNIESIENIA POJED. OS (cykl sondy 419,
DIN/ISO: G419)
Cykl sondy pomiarowej 419 mierzy dowolną współrzędną w
wybieralnej osi i wyznacza tę współrzędną jako punkt odniesienia. Do
wyboru TNC może zapisywać zmierzoną współrzędną także do tabeli
punktów zerowych lub tabeli preset.
1 TNC pozycjonuje sondę z posuwem szybkim (wartość z MP6150
lub MP6361) i przy pomocy logiki pozycjonowania (patrz
„Odpracowywanie cykli sondy pomiarowej” na stronie 26) do
zaprogramowanego punktu próbkowania
1
. TNC przesuwa przy
tym sondę pomiarową o odstęp bezpieczeństwa w kierunku
przeciwnym do zaprogramowanego kierunku próbkowania
2 Następnie sonda pomiarowa przemieszcza się na wprowadzoną
wysokość pomiaru i uchwyca poprzez proste próbkowanie
dotykowe pozycję rzeczywistą
3 Następnie TNC pozycjonuje sondę pomiarową z powrotem na
bezpieczną wysokość i przetwarza ustalony punkt odniesienia w
zależności od parametrów cyklu Q303 i Q305 (patrz „Obliczony
punkt odniesienia zapisać do pamięci” na stronie 69)
1. punkt pomiaru 1. osi Q263 (absolutnie):
współrzędna pierwszego punktu próbkowania na osi
głównej płaszczyzny obróbki
1. punkt pomiaru 2. osi Q264 (absolutnie):
współrzędna pierwszego punktu próbkowania na osi
pomocniczej płaszczyzny obróbki
Wysokość pomiaru w osi sondy Q261 (absolutna):
współrzędna środka kulki (=punkt dotknięcia) w osi
sondy pomiarowej, na której ma nastąpić pomiar
Bezpieczna wysokość Q320 (przyrostowo): dodatkowy
odstęp pomiędzy punktem pomiaru i kulką sondy
pomiarowej. Q320 działa addytywnie do MP6140
Bezpieczna wysokość Q260 (absolutna): współrzędna
na osi sondy pomiarowej, na której nie może dojść do
kolizji pomiędzy sondą i obrabianym przedmiotem
(mocowadłem)
X
Y
Q264
Q263
+
+
Q267
Q272=2
Q272=1
MP6140 + Q320
1
X
Z
Q260
Q261
+
Q272=1
Q272=3
Q267
1
Proszę uwzględnić przed programowaniem
Przed definicją cyklu operator musi zaprogramować
wywołanie narzędzia dla definicji osi sondy pomiarowej.