Go (patrz, 402, din/iso: g402)” na stronie 55) – HEIDENHAIN iTNC 530 (340 49x-04) Touch Probe Cycles Instrukcja Obsługi
Strona 55
HEIDENHAIN iTNC 530
55
3.1 Automatyczne rejestrowanie uko
śnego po
ło
żenia prze
dmiotu
OBROT PODSTAWOWY przy pomocy dwóch
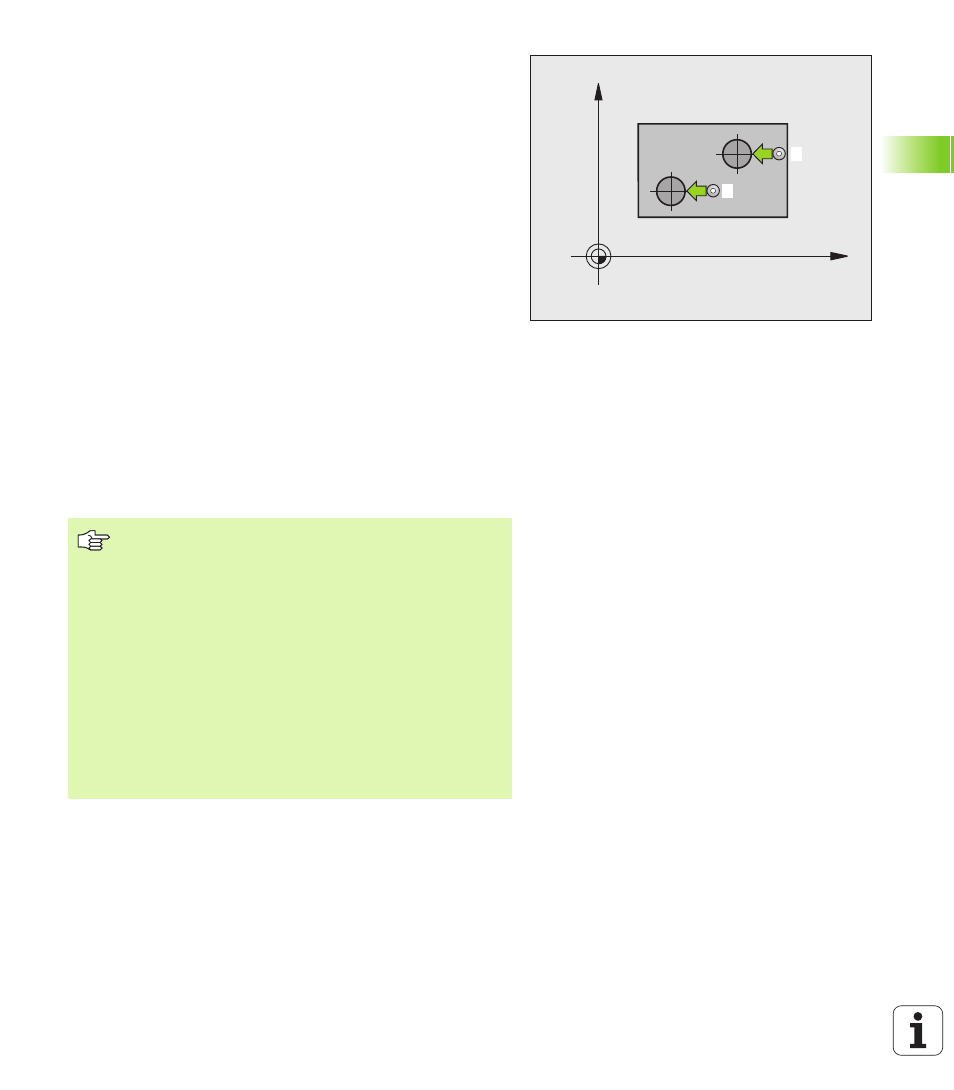
czopów (cykl sondy 402, DIN/ISO: G402)
Cykl sondy pomiarowej 402 rejestruje dwa punkty środkowe dwóch
czopów. Następnie TNC oblicza kąt pomiędzy osią główną
płaszczyzny obróbki i prostą łączącą punkty środkowe czopów.
Poprzez funkcję Obrót podstawowy TNC kompensuje obliczoną
wartość (Patrz także „Kompensowanie ukośnego położenia
przedmiotu” na stronie 35). Alternatywnie można kompensować
zarejestrowane ukośne położenie także poprzez obrót stołu okrągłego.
1 TNC pozycjonuje sondę z posuwem szybkim (wartość z MP6150
lub MP6361) i przy pomocy logiki pozycjonowania (patrz
„Odpracowywanie cykli sondy pomiarowej” na stronie 26) na punkt
próbkowania
1
pierwszego czopu
2 Następnie sonda pomiarowa przemieszcza się na wprowadzoną
wysokość pomiaru 1 i uchwyca przy pomocy pierwszych czterech
operacji próbkowania pierwszy punkt środkowy czopu. Pomiędzy
tymi każdorazowo o 90° przesuniętymi punktami pomiarowymi
sonda przemieszcza się po łuku kołowym
3 Następnie sonda pomiarowa powraca na bezpieczną wysokość i
pozycjonuje na punkt próbkowania
5
drugiego czopu
4 TNC przemieszcza sondę pomiarową na wprowadzoną wysokość
pomiaru 2 i uchwyca czterokrotnym próbkowaniem drugi punkt
środkowy czopu
5 TNC pozycjonuje sondę pomiarową z powrotem na bezpieczną
wysokość i przeprowadza ustalony obrót podstawowy
X
Y
1
5
Proszę uwzględnić przed programowaniem
Przed definicją cyklu operator musi zaprogramować
wywołanie narzędzia dla definicji osi sondy pomiarowej.
TNC wycofuje aktywny obrót podstawowy na początku
cyklu.
Ten cykl sondy pomiarowej nie jest dozwolony przy
aktywnej funkcji nachylenia płaszczyzny obróbki.
Jeśli chcemy kompensować ukośne położenie
wykorzystując obrót stołu okrągłego, to TNC używa
wówczas automatycznie następujących osi obrotu.
C dla osi narzędzi Z
B dla osi narzędzi Y
A dla osi narzędzia X