HEIDENHAIN PT 855 for Milling Instrukcja Obsługi
Strona 6
I 1
Podstawowe informacje dla danych dotychcz cych pozycji
POSITIP 855
Instrukcja obsługi dla użytkownika
7
I 1
Podstawowe informacje dla danych dotycz cych pozycji
Jeśli takie poj cia jak układ współrz dnych, wymiar
inkrementalny (przyrostowy), wymiar bezwzgl dny, pozycja
zadana, pozycja rzeczywista i odcinek końcowy s już
znane, można ten rozdział pomin ć.
Układy odniesienia
Aby móc podać pozycj , potrzebny jest zasadniczo
pewien układ odniesienia.
Na przykład można podawać pozycj wybranych punktów na kuli
ziemskiej poprzez ich geograficzne współrz dne (współrz dne:
łac. ”przyporz dkowane”; wielkości dla podania lub ustalenia
pozycji) ”długość” i ”szerokość” ”bezwzgl dna”: cała sieć
południków i równoleżników tworzy ”bezwzgl dny układ
odniesienia” w przeciwieństwie do ”wzgl dnych” danych o
położeniu, to znaczy z odniesieniem do innego znanego
miejsca lub miejscowości.
Południk 0° na rysunku po prawej stronie przebiega przez
obserwatorium astronomieczne w Greenwich, równoleżnikiem
0° jest równik.
0° 90°
90°
0°
30°
30°
60°
60°
Greenwich
+X
+Y
+Z
+X
+Z
+Y
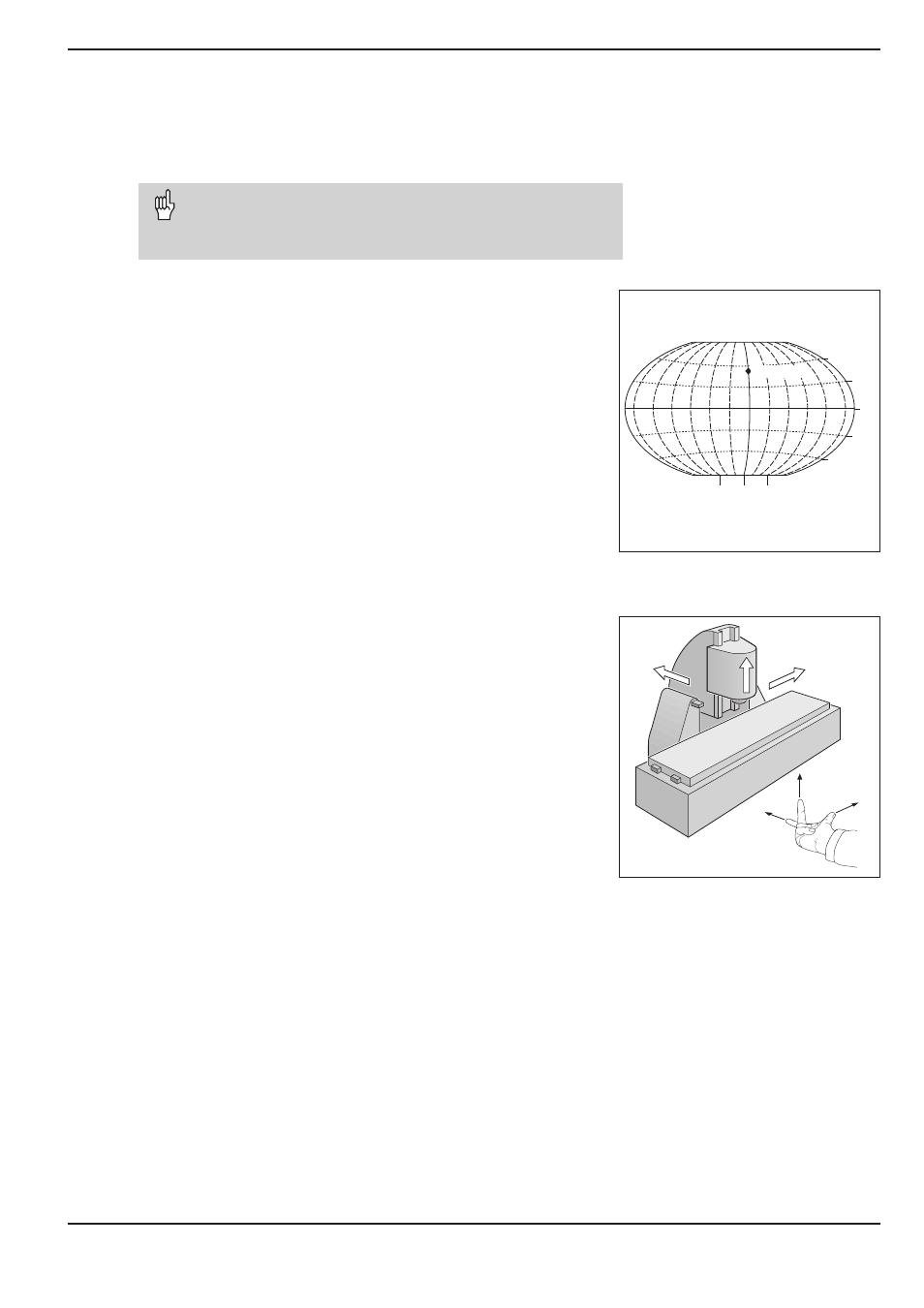
Dla obróbki przedmiotu na frezarce, która wyposażona jest w
numeryczny wyświetlacz położenia, wychodzi si generalnie rzecz
bior c ze stałego dla obrabianego przedmiotu kartezjańskiego
(= prostok tnego, nazwanego imieniem francuskiego
matematyka i filozofa René Descartes, w j zyku łacińskim
Renatus Cartesius; 1596 do 1650) układu współrz dnych, który
składa si z trzech, równoległych do osi maszyny osi
współrz dnych X, Y i Z; jeśli ustawimy palec środkowy prawej
dłoni w kierunku osi narz dzi od obrabianego przedmiotu do
narz dzia, to pokazuje on w kierunku dodatniej Z osi, kciuk w
kierunku dodatniej osi X i palec wskazuj cy
w kierunku dodatniej osi Y.
Rysunek 2: Oznaczenie i kierunki osi maszyny
w przypadku frezarki
Rysunek 1: Geograficzny układ współrz dnych
jest bezwzgl dnym układem
odniesienia