HEIDENHAIN PT 855 for Milling Instrukcja Obsługi
Strona 19
I
2
Praca z POSITIP – pierwsze kroki
20
Instrukcja obsługi dla użytkownika
POSITIP 855
Wyznaczanie punktu odniesienia: najechać pozycje i wprowadzić wartości rzeczywiste
Punkty odniesienia wyznacza si najprościej przy pomocy
funkcji próbkowania POSITIP a, bez znaczenia, czy obrabiany
przedmiot zostaje próbkowany przy pomocy czujnika
kraw dziowego KT firmy HEIDENHAIN, czy też zarysowany
narz dziem. Funkcje próbkowania opisane s od strony 22.
Naturalnie można również zupełnie konwencjonalnie zarysować
kraw dzie obrabianego przedmiotu jedna po drugiej i
wprowadzić pozycj narz dzia jako punkt odniesienia (przykład
na tej i na nast pnej stronie).
POSITIP zapami tuje do 99 ciu punktów odniesienia w jednej
tabeli
punktów odniesienia. W ten sposób niepotrzebne s
obliczenia drogi przemieszczenia, jeśli pracujemy ze
skomplikowanymi rysunkami technicznymi obrabianych
przedmiotów i z kilkoma punktami odniesienia.
W tabeli punktów odniesienia znajduj si do każdego punktu
odniesienia te pozycje, które POSITIP przyporz dkowuje
punktom referencyjnym na liniałach przy wyznaczaniu punktu
odniesienia (REF wartości).
Jeśli zmieniamy REF wartości w tabeli punktów odniesienia, to
przesuwamy punkt odniesienia.
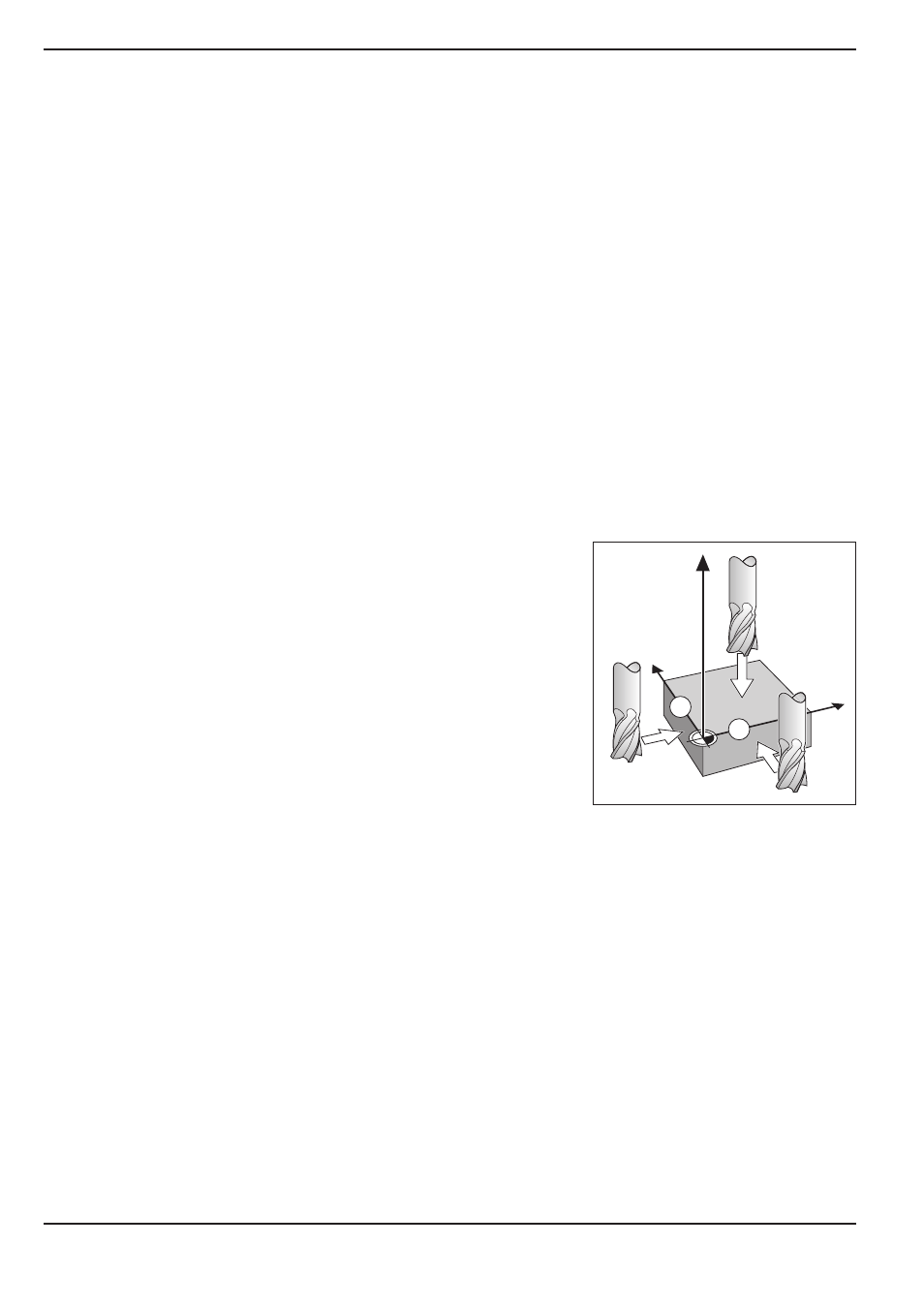
Przykład: wyznaczanie punktu odniesienia bez funkcji próbkowania
Płaszczyzna obróbki:
X / Y
Oś narz dzia:
Z
Promień narz dzia:
R = 5 mm
Kolejność przy
wyznaczaniu w tym
przykładzie:
X Y Z
Przygotowanie: wybór punktu odniesienia
Punkt odniesienia wybieramy przy pomocy pionowych klawiszy
ze strzałk .
POSITIP pokazuje numer aktualnego punktu odniesienia
po prawej stronie u dołu na ekranie.
Przygotowanie: wywołanie danych narz dzia
Prosz wywołać dane o narz dziu dla tego narz dzia, którym
zostanie zarysowany obrabiany przedmiot (patrz poprzednia strona).
Y
X
2
1
Z