HEIDENHAIN PT 855 for Milling Instrukcja Obsługi
Strona 10
I 1
Podstawowe informacje dla danych dotychcz cych pozycji
POSITIP 855
Instrukcja obsługi dla użytkownika
11
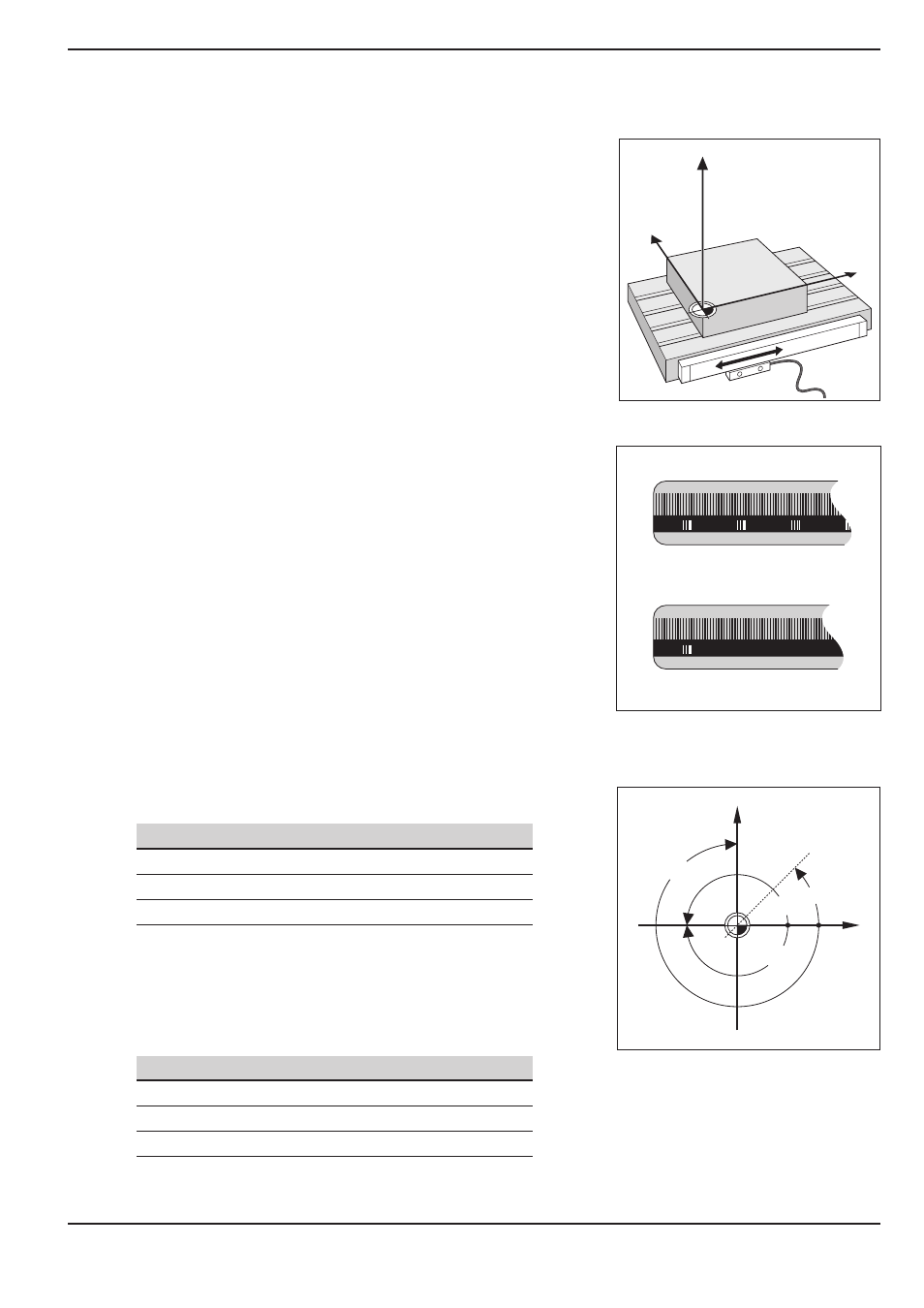
Układy pomiarowe położenia
Układy pomiarowe położenia przekształcaj przemieszczenia
osi maszyny w sygnały elektryczne. Urz dzenie POSITIP
opracowuje sygnały, określa rzeczywist pozycj osi maszyny i
ukazuje t pozycj w postaci wartości liczbowych na ekranie.
W przypadku przerwy w dopływie energii elektrycznej zostaje
utracone przyporz dkowanie pozycji suportu do obliczonej
pozycji rzeczywistej.
Przy pomocy znaczników referencyjnych układów pomiaru
położenia i REF automatyki POSITIP a można po wł czeniu
ponownie odtworzyć to przyporz dkowanie.
Oś odniesienia k ta
Dla danych o k tach zdefiniowane s nast puj ce osie
odniesienia:
Płaszczyzna
Oś odniesienia k ta
X Y
+X
Y Z
+Y
Z X
+Z
Dodatni kierunek obrotu jest ruchem w kierunku
przeciwnym do ruchu wskazówek zegara, jeśli
płaszczyzna obróbki, zostaje rozpatrywana w kierunku
ujemnej osi narz dzi (patrz rysunek 10).
Przykład: K t na płaszczyźnie obróbki X / Y
K t
odpowiada
+
45°
... dwusiecznej k ta pomi dzy +X i +Y
+/– 180°
... ujemnej X osi
–
270°
... dodatniej Y osi
Znaczniki referencyjne
Na liniałach wymiarowych układów pomiaru położenia
umiejscowione s jeden lub kilka znaczników referencyjnych.
Te znaczniki (punkty) referencyjne wytwarzaj przy przejeździe
sygnał, który dla POSITIP oznacza pozycj liniału jako punkt
referencyjny (punkt odniesienia liniału = stały punkt odniesienia
maszyny).
Przy przejeździe tych punktów referencyjnych POSITIP ustala
ponownie przy pomocy REF automatyzacji zaszeregowania
pomi dzy pozycj sań i wartościami wyświetlacza, które zostały
uprzednio ustalone.
W przypadku układów pomiarowych długości, wyposażonych w
znaczniki referencyjne z zakodowanym odst pem należy w tym
celu przemieścić osie maszyny tylko maksymalnie o 20 mm
(20° w przypadku układów pomiarowych k ta).
Y
X
Z
Y
X
+45°
+180°
–180°
–270°
Rysunek 8: Układ pomiaru położenia dla
osi linearnej, np. dla X osi
Rysunek 9: Liniały wymiarowe – u góry z punktami
referencyjnymi, o zakodowanym odst pie,
na dole z jednym punktem (znacznikiem)
referencyjnym
Rysunek 10: K t i oś odniesienia k ta,
np. na płaszczyźnie X / Y