Korekcja błędów, Liniowa korekcja błędów, Ii.2 nast awienie systemu – HEIDENHAIN ND 780 Instrukcja Obsługi
Strona 91
ND 780
91
II.2 Nast
awienie systemu
Korekcja błędów
Ustalona przez przyrząd pomiarowy droga przemieszczenia narzędzia
skrawającego nie zawsze odpowiada rzeczywistej drodze pokonanej
przez narzędzie. Błąd skoku wrzeciona albo ugięcie i przechylenie osi
mogą wywołać takie błędy pomiarowe. W zależności od rodzaju błędu
rozróżniamy pomiędzy błędami liniowymi i nieliniowymi. Można
stwierdzić te błędy przy pomocy porównawczego przyrządu
pomiarowego, np. przy pomocy VM101 firmy HEIDENHAIN lub przy
pomocy wymiarów końcowych. Przy pomocy analizy błędów można
określić konieczną kompensację błędów (liniowo lub nieliniowo).
ND 780 może te błędy skorygować. Dla każdego przyrządu
pomiarowego (na każdej osi) można zaprogramować własną korekcję
błędów.
Liniowa korekcja błędów
Liniowa korekcja błędów może być wykorzystywana, jeśli pomiar
porównawczy z wymiarem odniesienia wykazuje, iż istnieje liniowe
odchylenie na całej długości pomiarowej. To odchylenie może być
skorygowane poprzez współczynnik korekcji arytmetycznie.
Dla obliczania liniowej korekcji błędów używać następującego wzoru:
Współczynnik kompensacji LEC = ((S – M) / M) x 10
6
ppm przy czym
Przykład:
Jeśli długość mierzona przyrządem referencyjnym wynosi
500 mm i enkoder liniowy osi X-mierzy tylko 499,95, to wynika z
tego współczynnik korekcji LEC wynoszący 100 ppm (engl.: parts
per million = części na milion) dla osi X-:
LEC = ((500 – 499.95) / 499.95) x 10
6
ppm = 100 ppm (zaokrąglenie
na następną liczbę całkowitą).
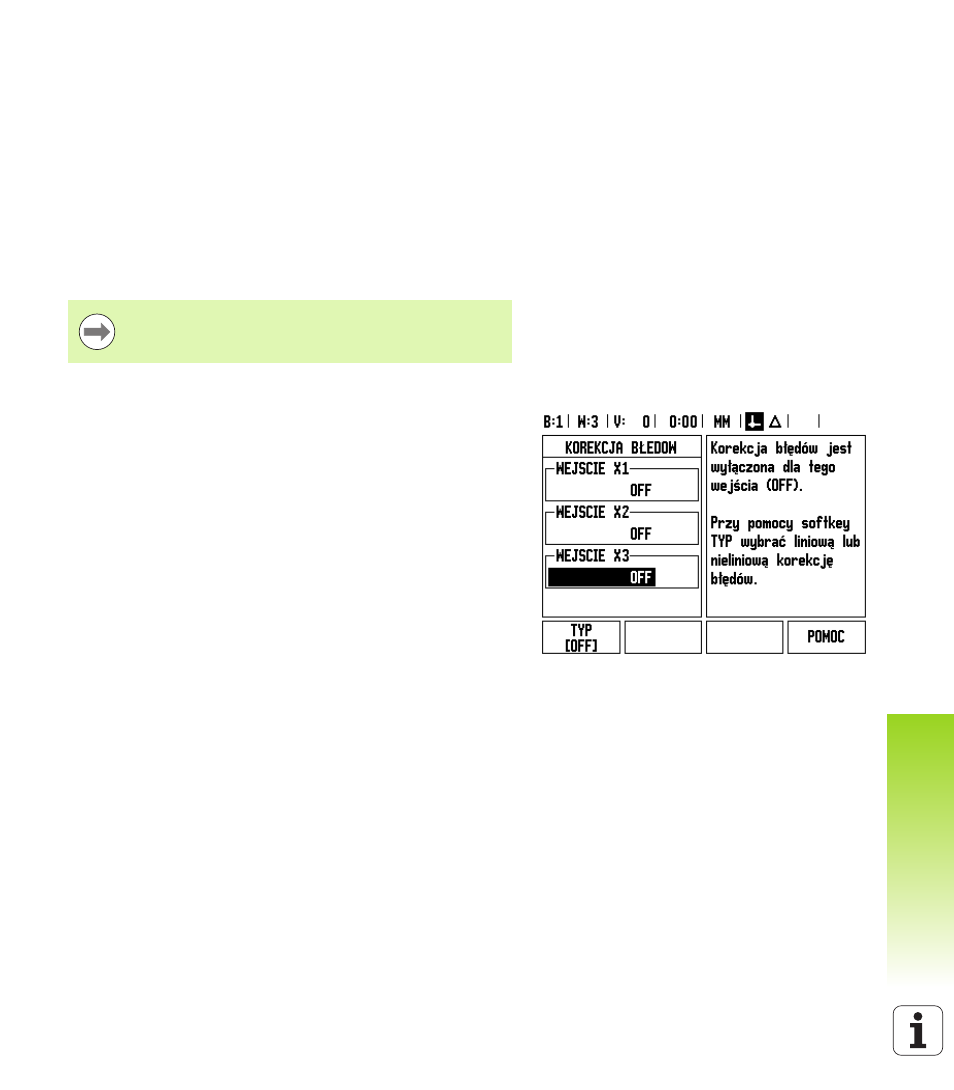
Jeśli błędy enkodera są znane operatorowi, to może wprowadzić on
bezpośrednio odpowiednie wartości. Przy pomocy softkey TYP
wybieramy kompensację (LINIOWO).
Proszę podać współczynnik kompensacji w ppm (odpowiada
mikrometrom na metr lub mikrocalam na cal) i potwierdzić z ENTER.
Ta korekcja błędów znajduje się do dyspozycji tylko, jeśli
używamy enkoderów liniowych.
S
zmierzona długość na standardzie referencyjnym
M
zmierzona długość przyrządem pomiarowym na osi