10 wybór wskazania położenia, Zastosowanie – HEIDENHAIN iTNC 530 (34049x-08) Instrukcja Obsługi
Strona 684
684
MOD-funkcje
17.10 W
y
bór wskazania po
ło
żenia
17.10 Wybór wskazania położenia
Zastosowanie
Dla Obsługi ręcznej i rodzajów pracy przebiegu programu można
wpływać na wskazanie współrzędnych:
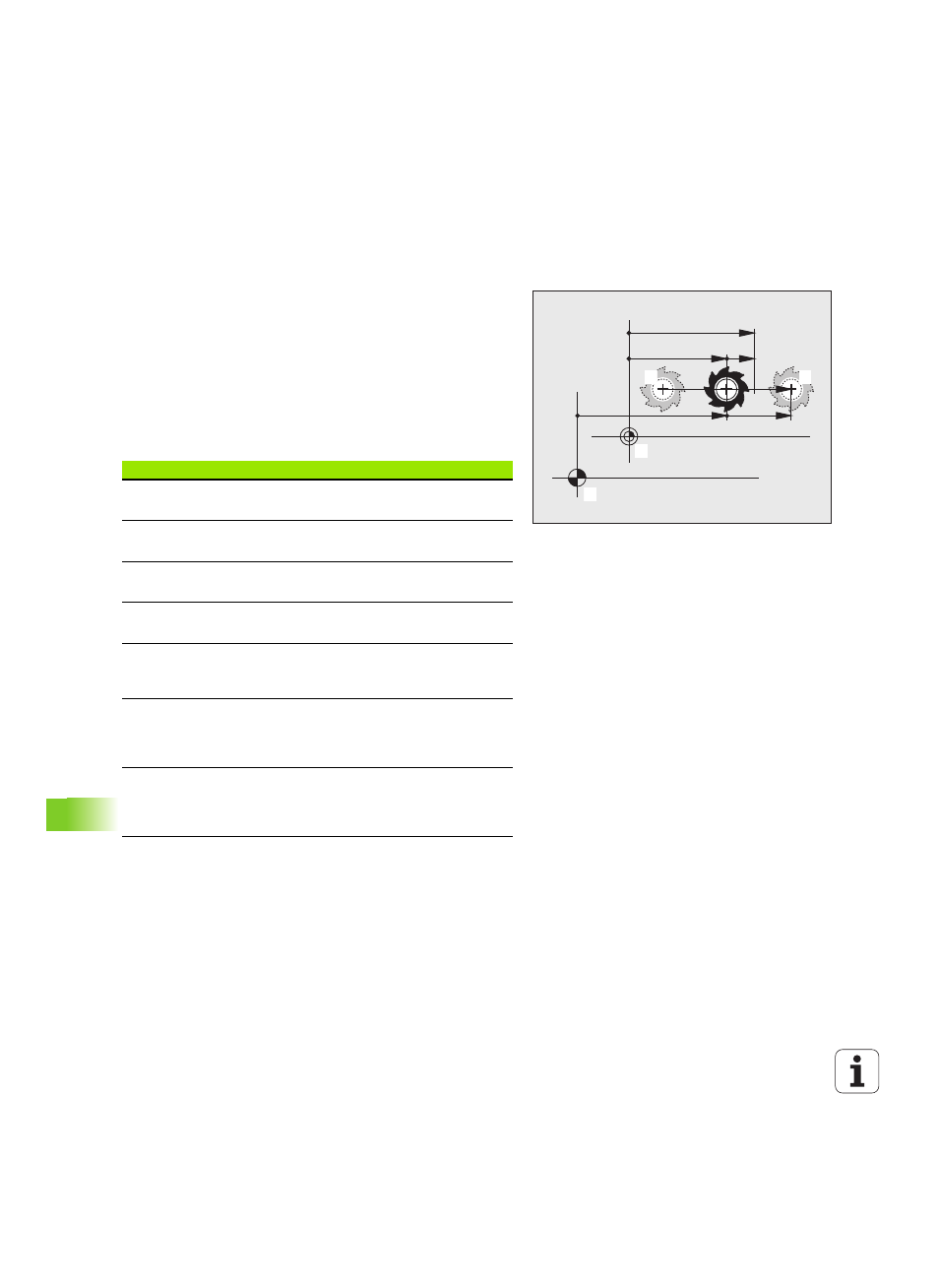
Ilustracja po prawej stronie pokazuje różne położenia narzędzia
1 Pozycja wyjściowa
2 Pozycja docelowa narzędzia
3 Punkt zerowy obrabianego przedmiotu
4 Punkt zerowy maszyny
Punkt zerowy maszyny dla wskazań położenia TNC można wybierać
następujące współrzędne:
Przy pomocy MOD-funkcji Wskazanie położenia 1 wybiera się
wskazanie położenia we wskazaniu statusu.
Przy pomocy MOD-funkcji Wskazanie położenia 2 wybiera się
wskazanie położenia w dodatkowym wskazaniu statusu.
ZAD.
RZECZ.
REF
DYSTANS
1
1
1
2
1
3
1
4
Funkcja
Wskazanie
Rzeczywista pozycja: momentalna pozycja
narzędzia
RZECZ.
Pozycja referencyjna; pozycja rzeczywista w
odniesieniu do punktu zerowego maszyny
REF
Błąd opóźnienia; różnica pomiędzy pozycją
zadaną i rzeczywistą
B.OPOZN.
Zadana pozycja; zadana aktualnie przez TNC
wartość
ZAD.
Dystans do zaprogramowanej pozycji w układzie
współrzędnych maszynowych; różnica pomiędzy
pozycją rzeczywistą i docelową
DYSTANS
Dystans do zaprogramowanej pozycji w
aktywnym (niekiedy nachylonym) układzie
współrzędnych; różnica pomiędzy pozycją
rzeczywistą i docelową
RW-3D
Odcinki przemieszczenia, które zostały
pokonane przy pomocy funkcji superpozycji kółka
obrotowego (M118)
(tylko wyświetlacz pozycji 2)
M118