10 wybór wskazania położenia, Zastosowanie – HEIDENHAIN iTNC 530 (340 49x-06) ISO programming Instrukcja Obsługi
Strona 566
566
MOD-funkcje
17.10 W
y
bór wskazania po
ło
żenia
17.10 Wybór wskazania położenia
Zastosowanie
Dla Obsługi ręcznej i rodzajów pracy przebiegu programu można
wpływać na wskazanie współrzędnych:
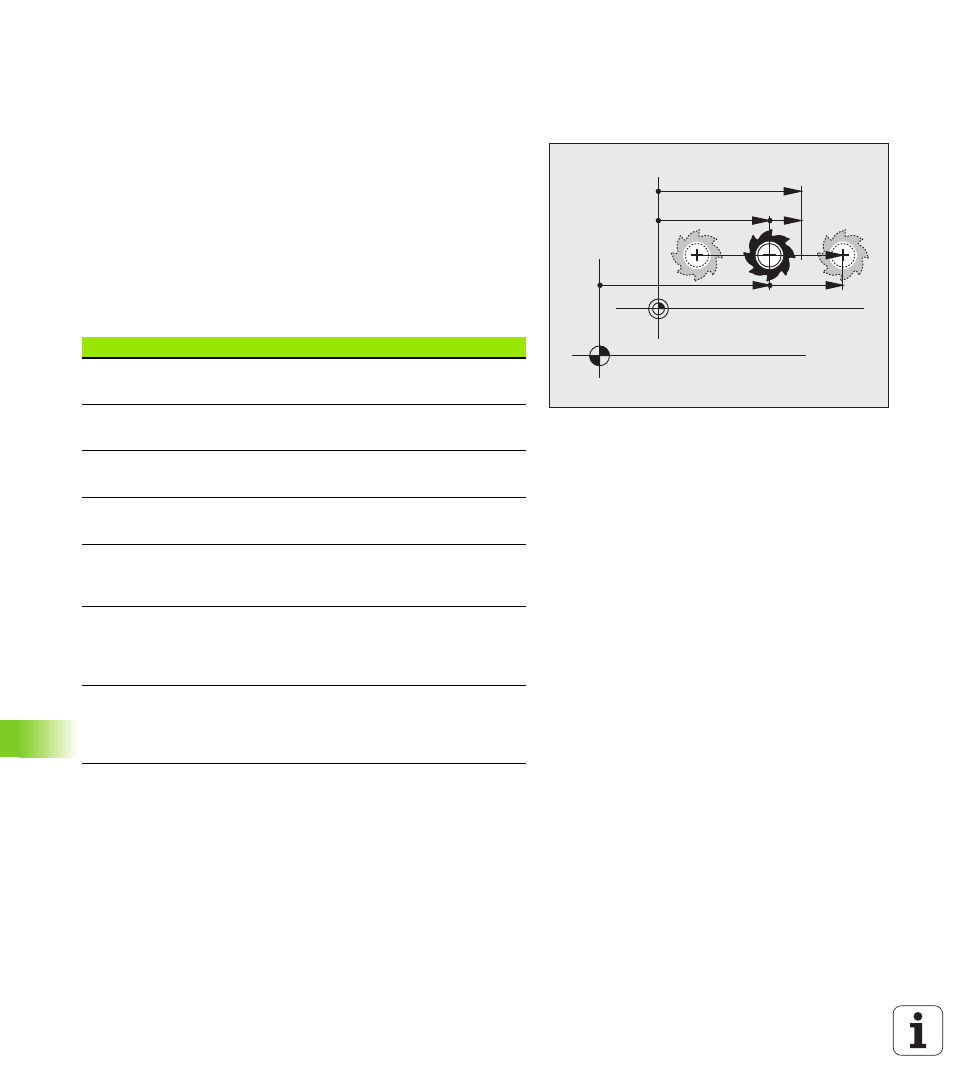
Ilustracja po prawej stronie pokazuje różne położenia narzędzia
Pozycja wyjściowa
Położenie docelowe narzędzia
Punkt zerowy obrabianego przedmiotu
Punkt zerowy maszyny
Punkt zerowy maszyny dla wskazań położenia TNC można wybierać
następujące współrzędne:
Przy pomocy MOD-funkcji Wskazanie położenia 1 wybiera się
wskazanie położenia we wskazaniu statusu.
Przy pomocy MOD-funkcji Wskazanie położenia 2 wybiera się
wskazanie położenia w dodatkowym wskazaniu statusu.
Funkcja
Wskazanie
Rzeczywista pozycja: momentalna pozycja
narzędzia
RZECZ.
Pozycja referencyjna; pozycja rzeczywista w
odniesieniu do punktu zerowego maszyny
REF
Błąd opóźnienia; różnica pomiędzy pozycją
zadaną i rzeczywistą
B.OPOZN.
Zadana pozycja; zadana aktualnie przez TNC
wartość
ZAD.
Dystans do zaprogramowanej pozycji w układzie
współrzędnych maszynowych; różnica pomiędzy
pozycją rzeczywistą i docelową
DYSTANS
Dystans do zaprogramowanej pozycji w
aktywnym (niekiedy nachylonym) układzie
współrzędnych; różnica pomiędzy pozycją
rzeczywistą i docelową
RW-3D
Odcinki przemieszczenia, które zostały
pokonane przy pomocy funkcji superpozycji kółka
obrotowego (M118)
(tylko wyświetlacz pozycji 2)
M118