Definicja punktów (plane points) – HEIDENHAIN iTNC 530 (340 49x-04) Pilot Instrukcja Obsługi
Strona 104
104
Funkcja
PLANE
(software
opcja
1)
Definicja punktów (PLANE POINTS)
SPECJALNE FUNKCJE TNC wybrać
NACHYLENIE PŁ.OBROBKI, PLANE POINTS wybrać
X-współrzędna 1. punktu płaszczyzny?: X-współrzędna P1X
Y-współrzędna 1. punktu płaszczyzny?: Y-współrzędna P1Y
Z-współrzędna 1. punktu płaszczyzny?: Z-współrzędna P1Z
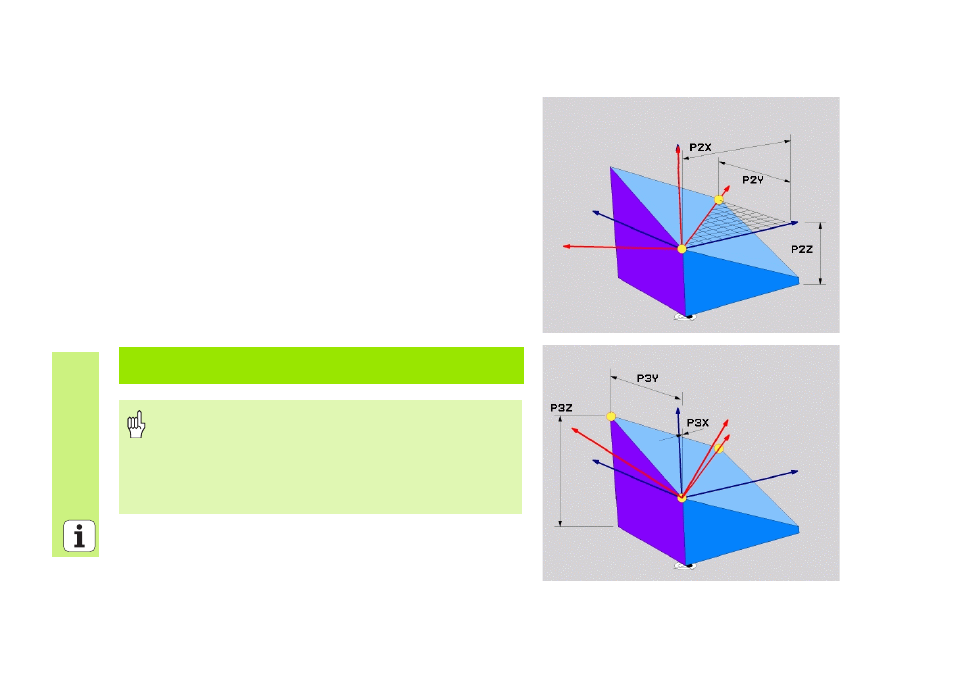
X-współrzędna 2. punktu płaszczyzny?: X-współrzędna P2X
Y-współrzędna 2. punktu płaszczyzny?: Y-współrzędna P2Y
Z-współrzędna 2. punktu płaszczyzny?: Z-współrzędna P2Z
X-współrzędna 3. punktu płaszczyzny?: X-współrzędna P3X
Y-współrzędna 3. punktu płaszczyzny?: Y-współrzędna P3Y
Z-współrzędna 3. punktu płaszczyzny?: Z-współrzędna P3Z
Dalej przy pomocy właściwości pozycjonowania (patrz
„Automatyczne inicjalizowanie (MOVE/STAY/TURN)” na stronie 108)
5 POINTS P1X+0 P1Y+0 P1Z+20 P2X+30 P2Y+31 P2Z+20
P3X+0 P3Y+41 P3Z+32.5 MOVE ABST10 F500
Proszę uwzględnić przed programowaniem
Połączenie punktu 1 z punktem 2 określa kierunek
nachylonej osi głównej (X w przypadku osi narzędzi Z).
Te trzy punkty definiują nachylenie płaszczyzny. Położenie
aktywnego punktu zerowego nie zostaje zmienione przez
TNC.