2 ciągnik, 1 dgps, 2 alarm pdop – ARAG Bravo 400S Navigator Instrukcja Obsługi
Strona 22: 3 kompensacja nachylenia, Programowanie zaawansowane "ciągnik
22
PROGRAMOWANIE ZAAWANSOWANE
"CIĄGNIK"
10.2
Ciągnik
Programowanie ciągnika zależy od wykonanych podstawowych ustawień (roz.9
), w oparciu o które zostaną zmienione pozycje Rys. 76.
Rys. 76
A100
•
DGPS
(par. 10.2.1).
•
Alarm PDOP
(par. 10.2.2).
Smart-Ag - Smart 6
•
Kompensacja nachylenia
(par. 10.2.3).
•
Procedura kalibracji nachylenia
(par. 10.2.4).
•
Alarm PDOP
(par. 10.2.2).
•
Typ korekty
(par. 10.2.5).
•
Zaawansowane dane odbiornika
(par. 10.2.6).
NMEA
•
DGPS
(par. 10.2.1).
•
Alarm HDOP
(par. 10.2.7).
Zaawansowane ustawienia ciągnika
•
Kamera
(par. 10.2.8).
Geometria ciągnika
•
Ustawienie geometrii ciągnika
(par. 10.2.9).
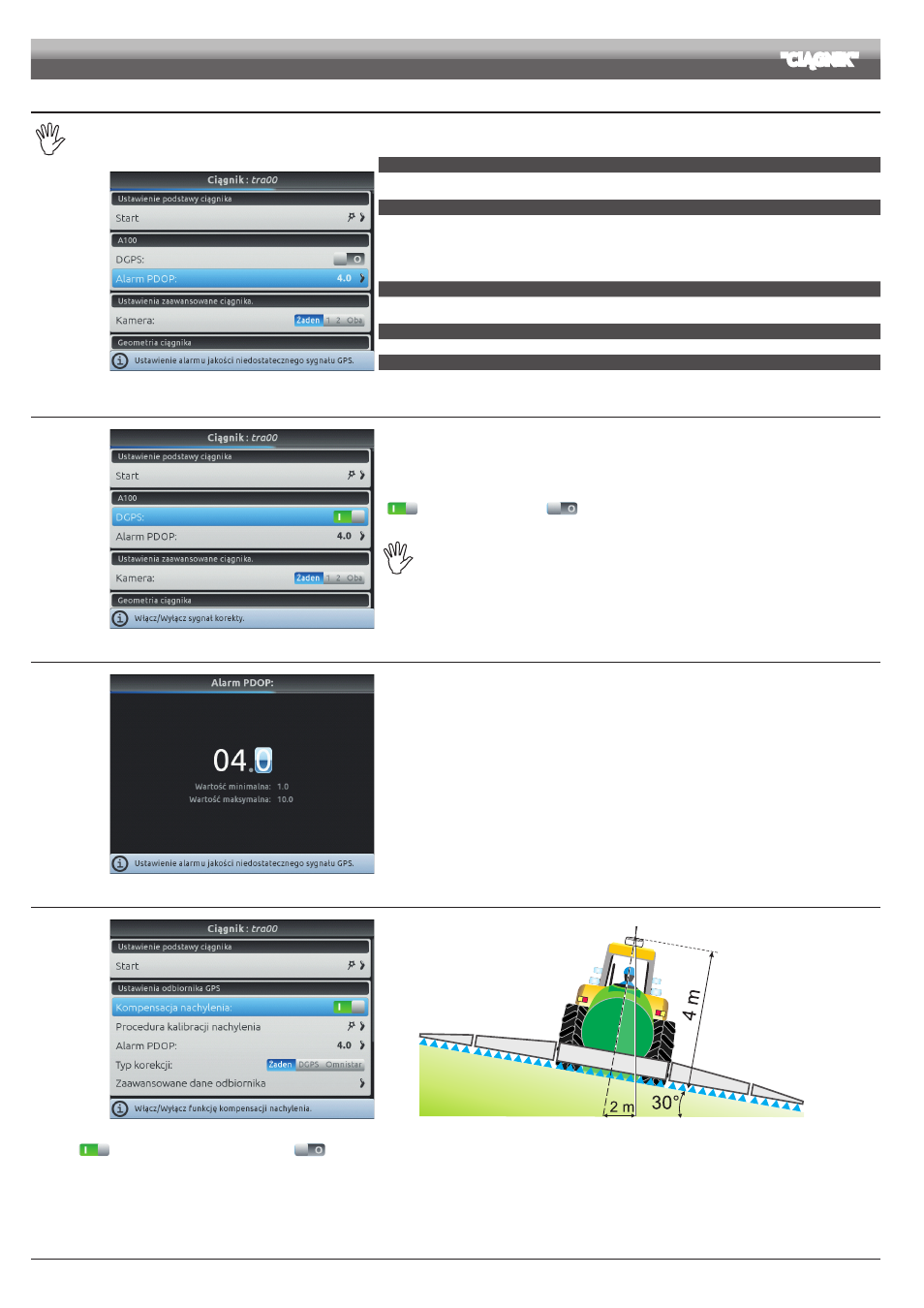
10.2.1 DGPS
Rys. 77
Pozwala na uaktywnienie/wyłączenie funkcji korekty różnicowej DGPS (SBAS)
(
Korekta DGPS aktywna /
Korekta DGPS nieaktywna).
Sygnał korekty różnicowej SBAS jest sygnałem bezpłatnym, dostępnym tylko w niektórych strefach
świata, który pozwala na uzyskanie większej dokładności pracy.
UWAGA: ta funkcja może być używana wyłącznie w Europie (EGNOS), Stanach
Zjednoczonych (WAAS) i Japonii (MSAS).
10.2.2 Alarm PDOP
Rys. 78
"PDOP" jest pomiarem, za pomocą którego pozycja i liczba satelitów w przestrzeni wpływają na
dokładność szerokości i długości geograficznej; im mniejsza wartość tym większa jest dokładność
jazdy.
Alarm dokładności włącza się gdy wartość PDOP zmierzona przez odbiornik GPS przekracza ustawioną
granicę.
Zalecamy NIE ustawiać wartości powyżej 4.0.
10.2.3 Kompensacja nachylenia
Rys. 79
Rys. 80
Pozwala na włączenie/wyłączenie funkcji kompensacji nachylenia pojazdu (tylko ze specjalną anteną. Patrz katalog ARAG).
(
Kompensacja nachylenia aktywna /
Kompensacja nachylenia nieaktywna).
Navigator jest w stanie skompensować błędy pomiarów spowodowane nachyleniem terenu.
Przy znacznych nachyleniach błąd może osiągnąć 2 m / 6.5 ft.