Przykład: ruch po prostej biegunowy – HEIDENHAIN iTNC 530 (60642x-03) ISO programming Instrukcja Obsługi
Strona 239
HEIDENHAIN iTNC 530
239
6.5 Ruchy po torze kszt
ał
towym– wspó
łrz
ędne biegunowe
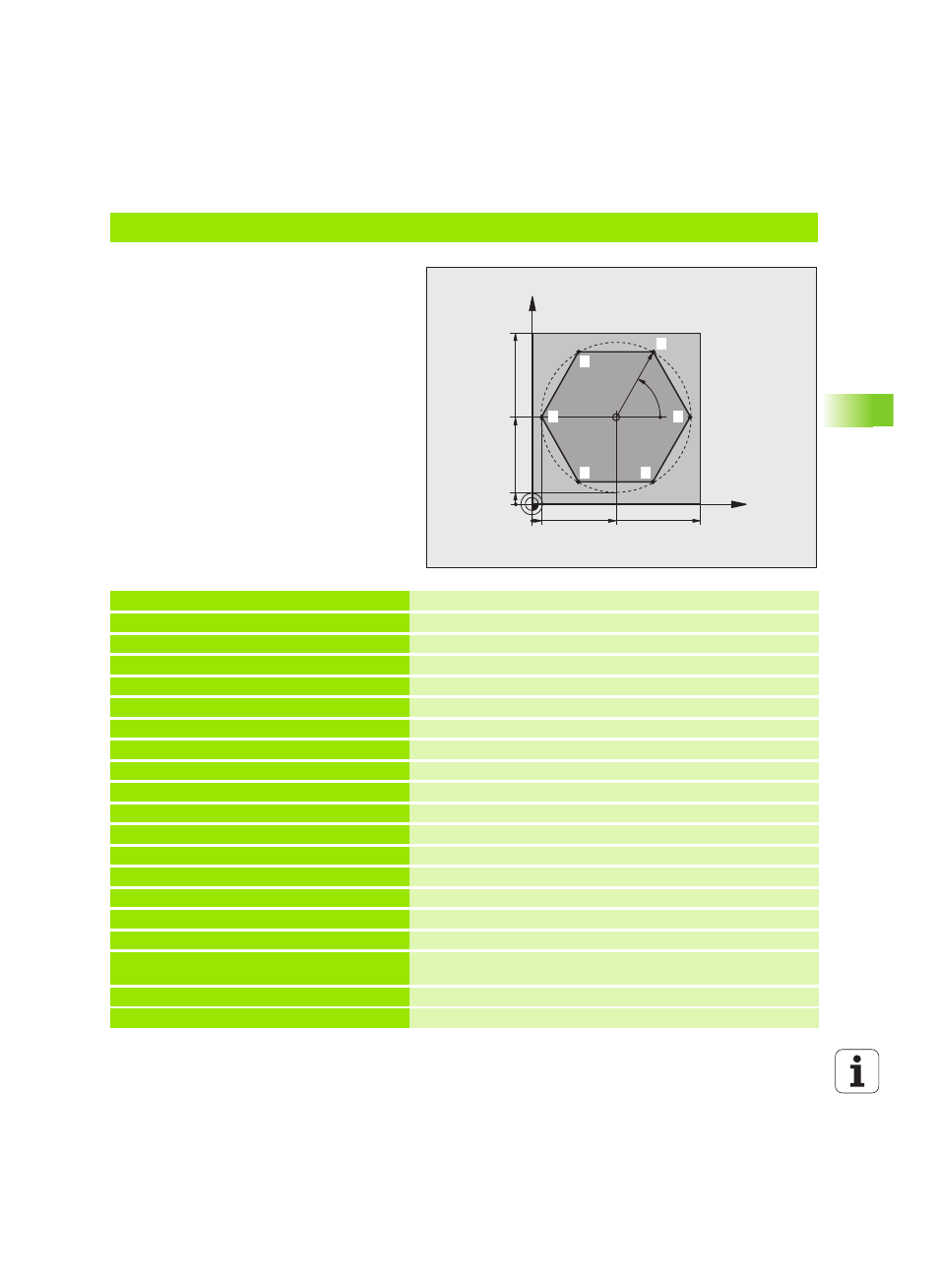
Przykład: ruch po prostej biegunowy
%LINIOWO G71 *
N10 G30 G17 X+0 Y+0 Z-20 *
Definicja półwyrobu
N20 G31 G90 X+100 Y+100 Z+0 *
N40 T1 G17 S4000 *
Wywołanie narzędzia
N50 G00 G40 G90 Z+250 *
Zdefiniować punkt odniesienia dla współrzędnych biegunowych
N60 I+50 J+50 *
Wyjście narzędzia z materiału
N70 G10 R+60 H+180 *
Pozycjonować wstępnie narzędzie
N80 G01 Z-5 F1000 M3 *
Przemieścić narzędzie na głębokość obróbki
N90 G11 G41 R+45 H+180 F250 *
Najechać kontur w punkcie 1
N100 G26 R5 *
Najechać kontur w punkcie 1
N110 H+120 *
Dosunąć narzędzie do punktu 2
N120 H+60 *
Dosunąć narzędzie do punktu 3
N130 H+0 *
Dosunąć narzędzie do punktu 4
N140 H-60 *
Dosunąć narzędzie do punktu 5
N150 H-120 *
Dosunąć narzędzie do punktu 6
N160 H+180 *
Dosunąć narzędzie do punktu 1
N170 G27 R5 F500 *
Tangencjalny odjazd
N180 G40 R+60 H+180 F1000 *
Przemieszczenie swobodne na płaszczyźnie obróbki, anulować
korekcję promienia
N190 G00 Z+250 M2 *
Swobodne przemieszczenie w osi wrzeciona, koniec programu
N99999999 %LINIOWO G71 *
X
Y
50
100
50
CC
5
100
R45
60°
5
4
1
2
6
5
3