Satel INTEGRA 128-WRL installer manual Instrukcja Obsługi
Strona 16
14 Instrukcja
instalatora
SATEL
Odległość manipulatora (lub innego urządzenia podłączanego do magistrali
manipulatorów) od centrali może wynosić do 300 m.
Urządzenia instalowane daleko od centrali mogą być zasilane lokalnie, z niezależnego
źródła zasilania.
Napięcie zasilania mierzone na zaciskach manipulatora LCD przy włączonym
podświetleniu wyświetlacza i klawiszy nie powinno być mniejsze niż 11 V.
Tabela 1 przedstawia liczbę wymaganych przewodów dla prawidłowego podłączenia
urządzenia do magistrali manipulatorów w przypadku użycia przewodów o średnicy 0,5 mm.
+KPD
COM
CKM
DTM
Odległość
Liczba przewodów
do 100 m
1
1
1
1
100-200 m
2
2
1
1
200-300
m
4 4 2 2
Tabela 1.
5.5.1 Adresowanie urządzeń podłączanych do magistrali manipulatorów
Każde urządzenie podłączane do magistrali manipulatorów musi mieć indywidualny adres
z zakresu od 0 do 7. Adresy nie mogą się powtarzać (centrala nie obsługuje urządzeń
o identycznych adresach). Zaleca się nadawanie kolejnych adresów począwszy od 0.
W manipulatorach adres jest ustawiany programowo. Fabrycznie ustawiony jest adres 0. Po
uruchomieniu centrali alarmowej z ustawieniami fabrycznymi obsługiwane są wszystkie
manipulatory podłączone do magistrali, niezależnie od ustawionych w nich adresów. Pozwala
to ustawić poprawne, indywidualne adresy w manipulatorach i przeprowadzić identyfikację
urządzeń podłączonych do magistrali.
W innych urządzeniach podłączanych do magistrali manipulatorów adres ustawia się przy
pomocy przełączników typu DIP-switch lub kołków.
Programowanie adresu manipulatora przy pomocy funkcji serwisowej
1. Wprowadzić hasło serwisowe (fabrycznie 12345) i nacisnąć klawisz .
2. Przy pomocy klawisza lub znaleźć na liście funkcji pozycję T
RYB SERWISOWY
i nacisnąć klawisz lub .
3. Uruchomić funkcję A
DRESY MANIPULATORÓW
(S
TRUKTURA
S
PRZĘT
I
DENTYFIKACJA
A
DRESY MANIPUL
.).
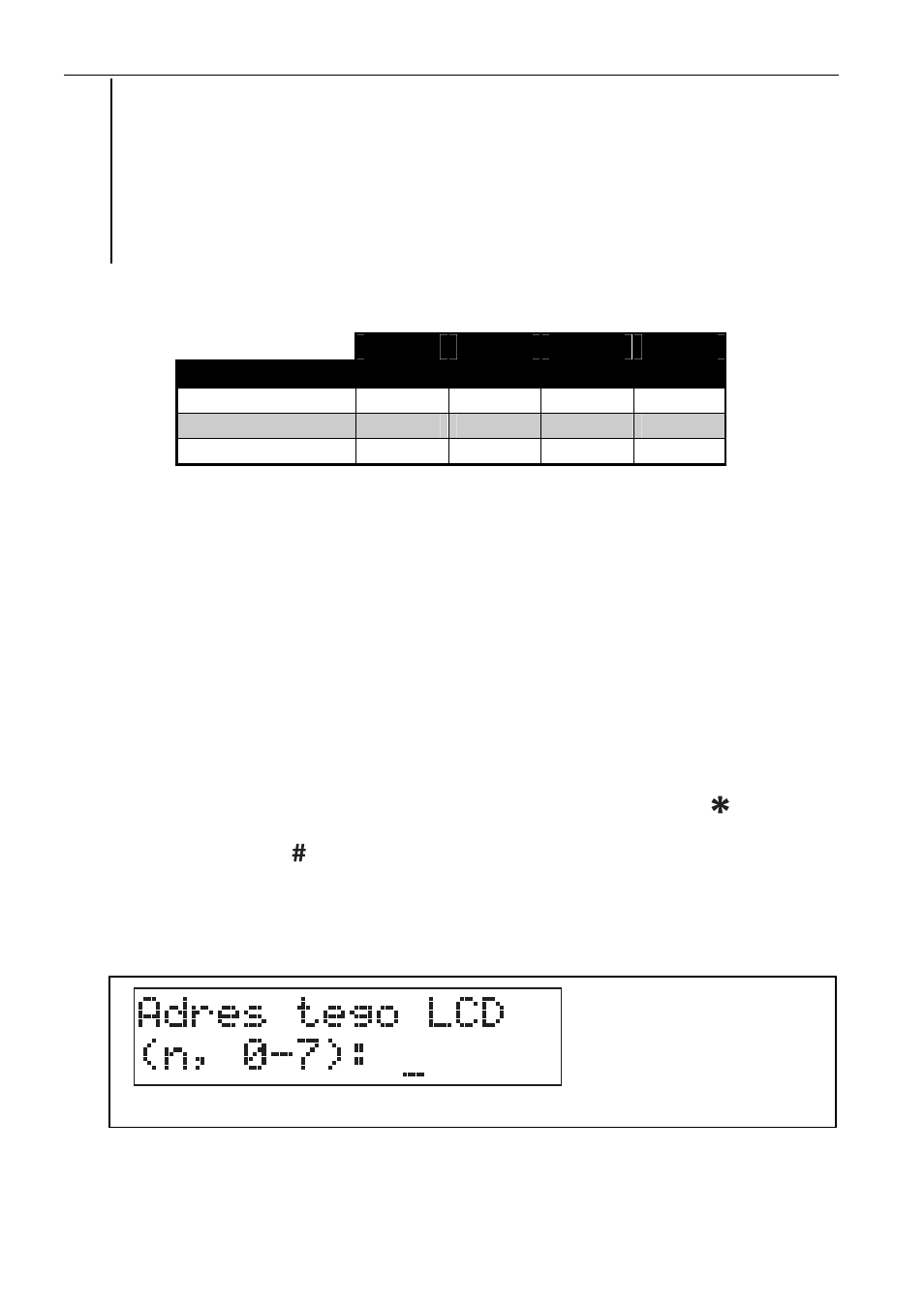
4. Na wyświetlaczach wszystkich podłączonych do centrali manipulatorów pojawi się
komunikat przedstawiony na rysunku 4.
n=0...7,
aktualnie ustawiony
adres manipulatora
Rys. 4. Programowanie adresu manipulatora przy pomocy funkcji serwisowej.
5. Wpisać prawidłowy adres z zakresu 0–7 w wybranym manipulatorze /
manipulatorach. Zmiana adresu zostanie potwierdzona czterema krótkimi i jednym
długim dźwiękiem.